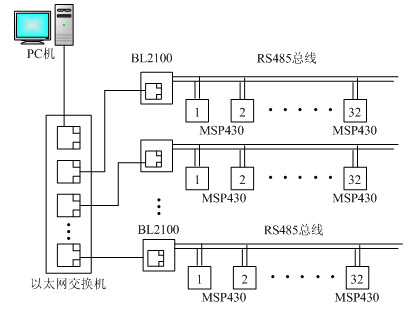
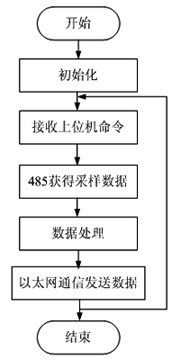
1 Introduction There are many variables that need to be measured and controlled in industrial process control. In the past, PC-based external data acquisition cards had a limited number of points and were connected directly to the PC's serial port or parallel port, which greatly limited the full use of PC resources. The emergence of industrial Ethernet lays the foundation for the open modular data acquisition. This project develops an open data acquisition system based on embedded intelligent modules of industrial Ethernet. Ethernet is currently the most widely used network. It is not only used in commercial networks, but also has made great inroads into industrial control in recent years and has achieved tremendous economic benefits. When Ethernet was first applied, it used the multi-carrier sense protocol with collision detection (CSMA/CD) and binary exponential backoff algorithm [1]. Under such protocols and algorithms, when the network is busy, its non-real-time and uncertainty increase greatly. Therefore, for a long period of time, Ethernet can only be used for office networks where real-time and deterministic requirements are not very high, and its application in industrial data communication is greatly limited. With the development of switching technology and full-duplex data communication technology, Industrial Ethernet has greatly improved the real-time and determinism in data communication, and has been successfully applied in many industrial fields. 2 Ethernet Technology Foundation for Industrial Data Communication Ethernet switching technology and full-duplex communication technology support. The Ethernet switching technology evolved from the original end-to-end bridge connection to the current Ethernet switch. In the process of data transmission, the storage and forwarding technology is widely used. The data packets of the input port are stored first, and then the CRC check is performed. After the error packet is processed, the destination address of the data packet is taken out and converted into an output port through the lookup table. Send package [2]. Because of this, the storage/forwarding method has a large delay in data processing, which is its shortcoming, but it can perform error detection on the packets entering the switch, and it is particularly important that it can support different speeds between the input and output ports. Conversion, maintaining high-speed port and low-speed port interoperability. Full-duplex technology is also widely used in Ethernet switches with the development of Ethernet technology. All major manufacturers now have models based on the IEEE 802.3X full-duplex communication protocol, which integrates the latest advances in current Ethernet technologies. With the support of switching technology and full-duplex technology, the uncertainty of Ethernet's uncertainty and real-time performance has been greatly improved, and it has been recognized by many manufacturers in the field of industrial data communications. Development of Network Microcontrollers and Corresponding Software Development Environment With the advancement of Ethernet communication technology, major manufacturers have introduced processors based on embedded Ethernet, and the Rabbit2000 used in this system is one of them. The BL2100 core module introduced by Z-World uses the Rabbit2000 processor. It is an Ethernet communication intelligent module specially used in the embedded field, supporting various network protocols (such as TCP, HTTP, FTP, SMTP, PPP, etc.) and development. The Socket programming system based on the TCP/IP protocol is used in the process [3]. Corresponding to the hardware configuration, Z-World provides a corresponding software development environment, namely Dynamic C language, which removes parts of the ordinary C language that do not meet real-time requirements, adds functions that are suitable for real-time control, and provides many functions. Rich function library, including math function library, I/O function library, serial communication function library, data acquisition and data output function library, and function library based on various network protocols for network communication [4]. BL2100 is very convenient in system programming (ISP), program development and debugging. 3 overall design of the system The system is designed as a three-tier network structure. The uppermost layer is a PC monitor, the middle layer is a network communication module BL2100, and the field layer is an MSP430 intelligent control node. The communication between the PC and the BL2100 is based on Industrial Ethernet. The communication between the BL2100 and the MSP430 is implemented using the RS-485 bus. The monitoring PC uses the configuration software to develop a corresponding monitoring interface, which can implement a variety of data processing functions, including historical data storage, real-time data dynamic display, and alarm information output. At the same time, the operator can issue different control commands according to different control requirements. The BL2100 network module has an industrial Ethernet interface and an RS-485 interface. Multiple network modules can connect to a PC monitor through an Ethernet switch. In a LAN, rich IP address resources can be utilized without being restricted by an external network. In the factory's internal environment. The main function of the MSP430 intelligent node is to receive the acquisition command, collect the field data, and transmit it to the BL2100 through the RS-485 bus. According to different hardware configurations, up to 128 MSP430 intelligent nodes can be attached to each bus. On the one hand, the BL2100 obtains sampling data of each node through data communication between RS-485 and MSP430. On the other hand, the data processing is packaged and sent to a PC monitor in a socket socket communication manner. The system structure is schematically shown in Figure 1. Figure 1 System connection structure 4 System Software Development The overall block diagram of the network module program is shown in Figure 2. Figure 2 The overall block diagram of the network module program During operation of the network module BL2100, the program first performs the necessary hardware initialization, and then receives the commands sent by the PC monitor, determines the configuration of each sampling channel of the system, including the sampling period, filter parameter settings, etc., and then issues commands through the RS-485 bus. MSP430 receives the order to carry on the data acquisition, after the collection completes sends to BL2100, then sends to the PC through the industry ethernet. In the Dynamic C language development environment used in this system, all the library functions needed to program the Socket network communication based on the TCP/IP protocol are provided. Socket communication first needs to create a socket, then assign address information to the socket, establish a socket connection, and finally perform data communication. In the process of communication, there must be a network status listening function and a network error handling subroutine. The communication of this system has real-time data and non-real-time data. The real-time data includes the data stream obtained by sampling. The non-real-time data is mainly a variety of sampling control parameter streams. Data communication is based on real-time data flow and non-real-time data flow. The program design is in the form of Server/Client, the network module BL2100 is the server, and the PC is the client. The following describes the main flow of Socket communication design with the data sending program running on the network module: Socket sockets are defined first, which is based on the TCP protocol and must contain all the information needed for a complete TCP connection. However, it is not a specific one for a connection, but a definition; secondly, the Sockets socket development environment is initialized mainly in the Dynamic C language compiler environment and supported by the development environment. This function loads Rabbit2000 related drivers for TCP and Socket. It must be invoked before all TCP and Socket related functions are called. Finally, it calls the subroutine that sends real-time data. In this case, a specific socket must be created. Connect, send data. Part of the subroutine source code is as follows: Void RealTimeDataSend(tcp_Socket* sock, long *buff, int* state, word my_port) {switch(* state) Case 0: If(tcp_open(...)!=0)//listen network to establish connection Printf("Connect success"); Else Sock_tick(...);//Socket management, transfer to sock_err() function after completion Timer_2=MS_TIMER;//timer (*state)++; Break; Case 1: If(sock_established(sock)) // Create a socket for this connection {// Establishing a socket successfully *state=2; ...... Printf ("Socket success establish!!!"); } Else if(MS_TIMER-time_2>OUT_TIME) {//Timeout processing *state=3; ...... } Case 2:// send data If(send_start=0)// is the first real-time and non-real-time parameter variable for sending data. {sock_fastwrite(buff);//Write data to send buffer Send_start=1; } Else if(send_start=1) {// send only real-time variables Sock_fastwrite(buff); *state=2; Break; ...... } Case3: Sock_abort(sock);//Close the socket Break; ...... Sock_err(...);//Socket error handling } The above describes the flow of sending data from a network module to a PC. However, this is only one-way data flow. As mentioned above, current industrial Ethernet technology supports full-duplex communication, that is, bidirectional flow of data can be perfectly implemented. Based on this, the on-site intelligent nodes continuously send acquisitions to PCs. At the same time, data can also receive control information from the PC and its corresponding data flow at any time. This article designed the corresponding data receiving subroutine. The function is defined as follows: UnRealTimeDataReceive (tcp_Socket *sock, long *buff, int *state, word my port) {... Case2: Sock_fastread(buff);//Read data from the receive buffer ...... } The definition of the parameter is compared with the receiving subroutine only if *state is equal to 2. When the network module receives data, it obtains the index number of the parameter to be received according to the first data in the buffer, and the buffer will be second. The data is assigned to a specific parameter variable. Another point to note is that the staff conducts monitoring operations. This process is not performed in real time and is highly random. Therefore, the control information flow does not exist in real time, but is random. Each network module will continuously listen to the network to check whether there is a data packet corresponding to this module, and if so, enter the receiving subroutine. 5 Concluding remarks This paper discusses the application of Industrial Ethernet in industrial data communication based on data acquisition system, and introduces Socket network programming based on TCP protocol under Dynamic C environment. After the development of this system, it was used in a set of automatic control system for leather painting, which has been successfully applied. Practice has proved that the communication based on industrial Ethernet is very stable and the delay is very small. In the case where a PC monitor is connected to multiple leather painting systems at the same time, the operation is also stable, and the real-time and determinism are effectively Guarantee. It can be foreseen that the application of industrial Ethernet in industrial data communication will be increasingly widespread. Socket socket communication based on TGP/IP protocol is simple, practical and stable as a method of realization, and it has obtained the support of most industrial monitoring and development software. The current integrated management and control of industrial production process computer integrated control system (CIPS) is rapidly developing, and industrial Ethernet technology has greatly accelerated the pace of CIPS's entry into factory and enterprise, which greatly promotes the informationization process of manufacturing. The author of this article innovates: According to the status quo of industrial data acquisition, a new data acquisition scheme based on industrial Ethernet is proposed. The core module BL2100 with Ethernet communication interface extended based on Rabbit2000 high-performance single chip microcomputer and its application should be adopted. The Dynamic C development environment implements Socket-based industrial Ethernet data communication and is successfully used in actual production to meet the real-time and accuracy requirements of industrial data communication. references [1] Feng Yu, Feng Zhongyi. Application Research of LAN Video Transmission Based on Socket Network Programming Interface [J]. Microcomputer Information, 1998, 14:5:17-20. [2] Tarerbaum A S. Pan Aimin. Computer networks (fourth edition)[M]. Beijing: Tsinghua University Press, 2004. [3] Z-World Inc. Dynamic C premier for semiconductor microprocessors integrated C development system user's manual [M]. California: Z-world Corporation, 1999. [4] Z-World Inc. Dynamic C TCP/IP user's manual[M]. California: Z-world Corporation, 2001.
Offshore communication cable
Name:0.6/1kV low smoke halogen free offshore communication cable
Model:S1 RFOU(I), S2 RFOU(C), S3 BFOU(I), S4 BFOU(C)
S1/S5 RFOU(I), S2/S6 RFOU(C), S3/S7 BFOU(I), S4/S8 BFOU(C)
Specification:(1~37 Pairs)×(0.75~2.5)mm2, (1~37 Triples)×(0.75~2.5)mm2
Executive Standards:IEC60092-350, NEK606
Application:The cable is mainly intended for instrumentation, communication, control, and alarm system of offshore units, The codes S1/S5, S2/S6, S3/S7, S4/S8 meets the mud resistant requirements in NEK606.
Flame Retardant Marine Communication Cable 4 Core Cable,Flame Retardant Marine Communication Cable,Offshore Communication Cable Flame Retardant,Halogen Free Flame Retardant Shipboard Cable Jiangsu Jiangyang Special Cable Co,.Ltd. , https://www.jymarinecable.com