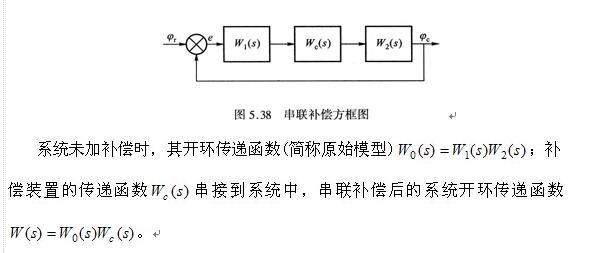
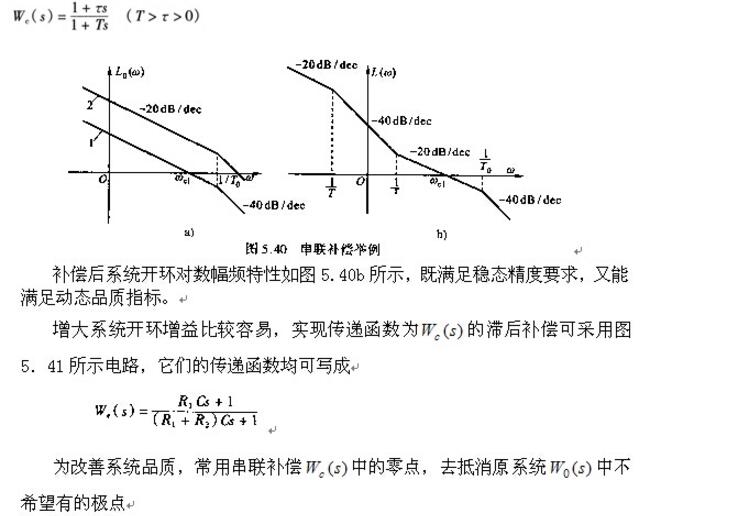
This article first introduced the requirements of the servo system technology, then elaborated the servo system compound control technology and nonlinear compensation technology, and finally introduced the commonly used linear compensation of the servo system, specifically follow the small series together to find out. 1, system accuracy The precision of the servo system refers to the precision of the output signal required to reproduce the input signal. It is expressed in the form of error and can be summarized as three parts: dynamic error, steady state error and static error. 2, stability The stability of the servo system refers to the ability of the system to recover to its original stable state after the disturbance acting on the system disappears, or the ability of the system to reach a new stable operating state when a new input command is given to the system. 3, response characteristics The response characteristic refers to the response speed of output changes following the input command, which determines the system's working efficiency. The speed of response is related to many factors, such as the speed of the computer, the damping and quality of the motion system. 4, working frequency The operating frequency usually refers to the frequency range of the input signal allowed by the system. When the operating frequency signal is input, the system can work normally according to technical requirements; while other frequency signals are input, the system cannot work normally. First, compound control technology 1. Invariant principle of disturbance compensation When the control system is working, except for the control input, disturbances often act on the system. In order to accurately reproduce the input of the system output, the disturbance must be compensated. For this reason, it has been proposed that the “immutation principle†of the disturbance compensation. . 2. Compound control servo system On the basis of the error control, the feed forward compensation channel (also called disturbance control) is introduced to form a compound control system, also known as an open-loop and closed-loop control system. 3, model tracking control system The model tracking control system is seen as a form of compound control. Second, nonlinear compensation technology Only relying on the linear compensation technology, it is sometimes difficult to achieve the user's requirements for the quality of the servo system. Therefore, non-defective compensation technology and multi-mode control technology are increasingly used in the servo system. In a servo system, a compensation device (usually a compensation circuit) having a linear characteristic is often used, and serial, forward (or parallel) feedback, negative feedback, positive feedback, and combinations thereof are used to improve the characteristics of the system and improve the system. Quality of work. The following describes the characteristics of various compensation connections and related precautions. 1, series compensation Series compensation refers to connecting the appropriate compensation device (circuit) in the main channel of the system (ie forward channel). as the picture shows. The commonly used series compensation devices are all composed of circuits, and there are passive compensation networks consisting only of R, L, and C. There are active compensation networks that use linear integrated amplifiers. All of them can transmit DC signals. Therefore, only the parts that transmit DC signals in series in the system line can play a corresponding role. If the system transmits a fixed-frequency AC carrier signal, the above two types of compensation networks cannot be used. Commonly used compensation networks are also practical in many forms. As a series compensation of the system, some of them cannot be used, because in the main channel of the system, a circuit containing a pure differential link cannot be serially connected (ie, a network containing zeros with s=0 is not connected in series), it will block constant The effective transmission of signals makes the servo system unable to work effectively. In order to improve the steady-state accuracy of the system, a method of increasing the type of the system (that is, no difference) is often used. This requires that an integral step or a serial PI regulator be cascaded into the forward main channel of the system. If the open-loop logarithmic frequency characteristics of the system (the system is the minimum phase system) is shown as curve 1 in Figure 5.40a. Under zero initial conditions, the response of the system to the input step signal can meet the dynamic quality requirements, but the system's steady-state accuracy is not high; in order to improve the system's steady-state accuracy, the system's open-loop gain must be increased, and the system's open-loop logarithmic amplitude frequency The characteristic is shown as curve 2 in Figure a, but the dynamic quality of the system does not meet the requirements at this time. In addition to increasing the open-loop gain of the system, a hysteresis compensation is connected in series. Curing Screen Protector,Hydrogel Phone Cutting Machine,Protective Film Cutter Machine,Screen Protcter Custting Machine Shenzhen TUOLI Electronic Technology Co., Ltd. , https://www.szhydrogelprotector.com